
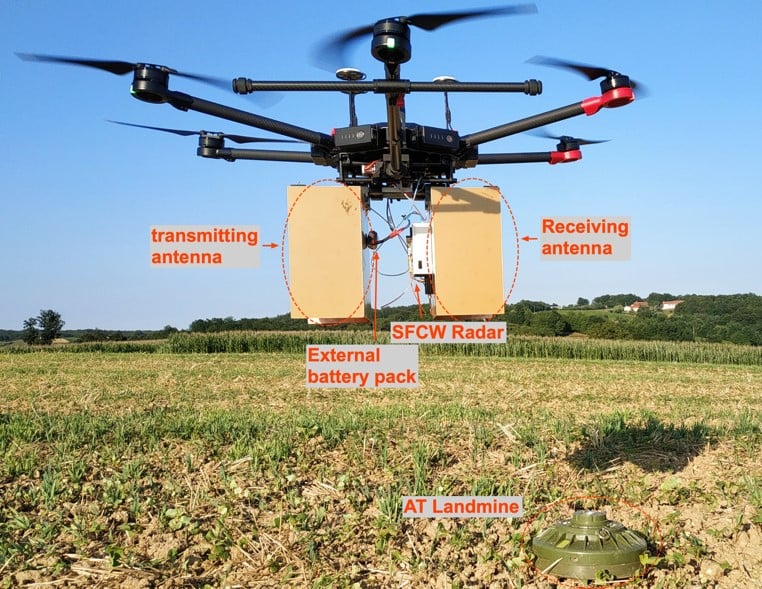
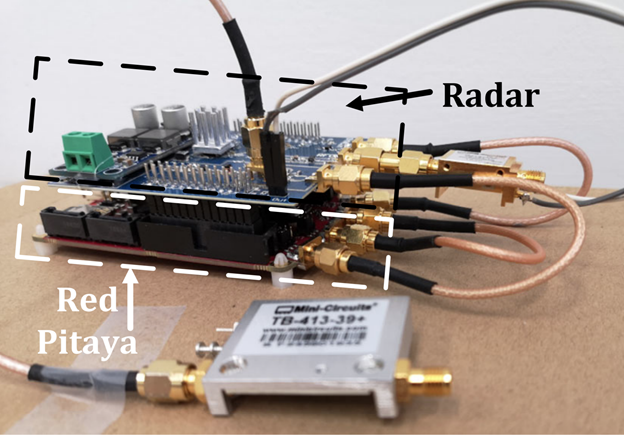
Red Pitaya was used by a research group from the University of Maribor to control a low-cost ground penetrating radar attached to a hexacopter with the purpose of detecting landmines.
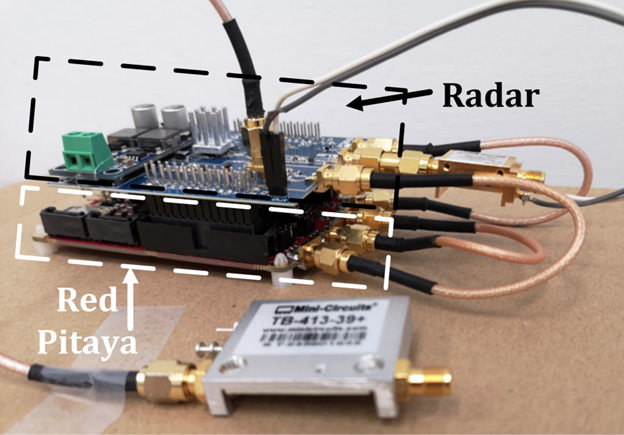
The project, which was in development for three years, uses Red Pitaya for onboard signal processing, radar manipulation and transmitting data to the host computer via the TCP/IP protocol.
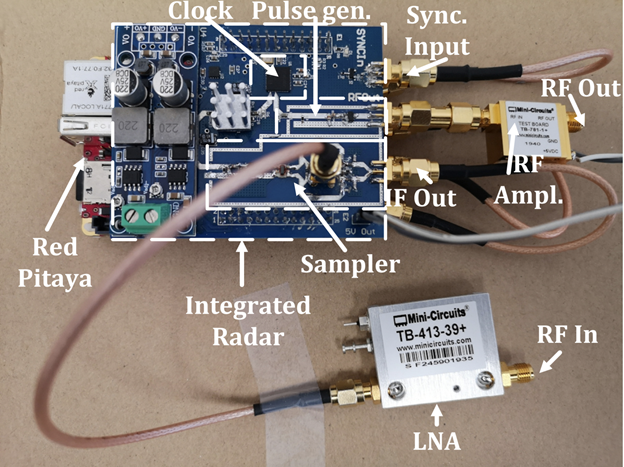
The goal of this project was to develop a Ground Penetrating Radar (GPR) and attach it to a flying vehicle called a hexacopter. Within this project the team developed a stepped frequency (SFCW) radar and pulse radar, which operate in frequency and time domains, respectively. Both radars were tested on a minefield, by attaching them to a small ground vehicle and later also a hexacopter. The proposed timeline of the project was achieved, and all activities within the project we’re successfully completed.
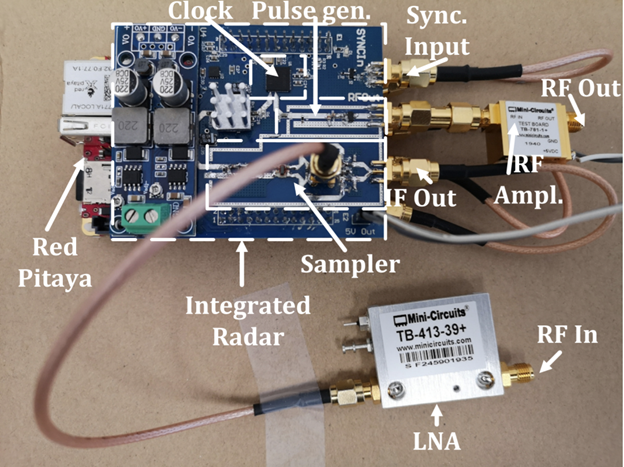
Within the first year of this project the principles of GPR were studied, in order to better understand image interpretation and implement a GPR on a Software Defined Radio (SDR - USRP). Since the USRP device has several hardware limitations, this represented the most challenging task. As soon as the simulations with the USRP platform provided useful information about the suitable frequency and power range, a custom hardware design was developed. Part of this was a frequency domain radar, which uses standard telecommunications components and operates within a frequency range of 550 MHz - 2.7 GHz. The radar uses a step frequency principle and is able to generate a frequency sweep within 10 ms using 200 frequencies steps.
A time domain radar was also developed using the Ultra-Wide Band (UWB) principle. The results show that the radar is suitable when it’s used with a ground driven vehicle, but performed poorly when attached to a hexacopter. This is due to the nonuniform hexacopter movements, which affect the sampling mixer on the radar front end.
Since the SFCW radar performed better, this allowed us to upgrade the existing radar to a sparse-based system. This helped to reduce the scanning time by reducing the number of frequency steps by 40%, and then using compressed sensing principles to reconstruct the signal.
In the third year of the project software was developed to transmit data from the hexacopter platform to a PC in real-time, and also to store additionally onboard.
Synthetic Aperture Radar (SAR) techniques have also been implemented in the post-processing stage to achieve better object-to-ground contrast, with satisfying results. Current work includes the additional use of GPS data, so the radargram can be geolocated, thus simplifying the landmine localization.
The final software was tested with a potential end-user at the Military Academy of the Republic of Macedonia, and considerable interest also exists at the demining centre in Slovenia.
Here you can see the hexacopter in action, or read more about the project on the official site.




Recent Posts
-
.png?width=767&name=blog%20featured%20image%20(13).png)
-
.png?width=767&name=blog%20featured%20image%20(11).png)
-
.png?width=767&name=blog%20featured%20image%20(12).png) July 22, 2026
July 22, 2026